楽しく学ぶ…解析力学
ネーターの定理 (1) 循環座標
運動量保存則は空間の並進対称性と, エネルギー保存則は時間発展対称性と結びついている。というものだが。
ネーターの定理 あまり神秘的に考えない方が良い。
「対称」という用語の使い方に注意が必要である。正三角形は各辺の垂直2等分線に対して線対称である, 或いは重心を中心とした120度の回転対称であるという。
ある操作の前後で変化しないことを「対称」と呼んでいる。筆者などは, 対称→シンメトリー→造形美と短絡思考になっているが, ネーターの定理で使う「対称」は味気ないものである。
その操作の前後で変わらなければ良い。それを不変, 保存, 対称と呼んだりする。造形美と直結させない方が良さそうである。
循環座標(\(cyclic\;coordinate\)) もう一つの表現, 無視座標(\(ignoreable\;coordinate\))の方が分かり易いが。
中心力を受けて周期運動する場合, ポテンシャルは\(~r~\)だけの関数になり, \(\theta~\)は運動方程式(ニュートン, ラグランジュ, ハミルトン全て)には含まれない。(\(\dot{\theta}~\)は含まれる.)
このとき\(~\theta~\)は1周期で元に戻ってくるので循環座標と呼ぶ。語源はここ等あたりにあるらしい。(ゾンマーフェルト, 山本義隆)
自由粒子の運動 これをネーターの定理と呼べるのだろうか?
オイラー・ラグランジュ方程式は,
\[\frac{d}{dt}\left(\dd{L}{\dot{q}}\right)=\dd{L}{q}\tag{1} \]
であった。ポテンシャルの影響の無い自由粒子の場合, \(L=T=1/2\;m\dot{q}^2~\)であるから, ラグラジアンに\(~q~\)(循環座標)は含まれない。よって上式右辺はゼロから直ちに
\[\dd{L}{\dot{q}}=\dd{T}{\dot{q}}=m\dot{q}=const. \]
となり, 運動量が保存する。ラグラジアンに座標\(~q~\)が含まれない(循環座標)ならば, 座標\(~q~\)が変化(並進)してもラグラジアンは不変(対称)であり, 運動量は保存する。
ここで次の疑問が起こる。\(\theta~\)が循環座標であっても\(~\dot{\theta}~\)は影響するのではないか?心配は要らない。
\(\theta~\)が定数だけ変化\(~\theta=\theta+a~\)しても\(~\dot{a}=0~\)となるから,\(~\dot{\theta}~\)は変化しない。
「運動量保存則は空間の並進対称性と対応している」と言えなくもないが, 定理というほどのものだろうか?
自由粒子で何の相互作用もなければ運動量も何も変わらない。当たり前すぎる。
ポアッソン括弧では\(~\{A,p\}=0~\)のとき, \(A~\)は\(~p~\)に正準共役な\(~q~\)に対して不変量となると言った。その通りであるが何だか良く分からない。もう少し具体的に説明しよう。
座標変換でラグラジアンが不変
誤解しやすいので確認しておこう。座標変換しても
方程式の形が変わらないのが共変で, ここでの説明は共変ではなく, 値そのものが変わらないことである。
一般化座標\(~q'_i=q_i+\varepsilon\Phi_i(q_i), |\varepsilon|\ll1~\)という無限小の座標変換を考える。\(\Phi_i~\)とする理由は,
複雑な座標変換(2次元, 3次元)に対応するためで, モーメント関数と関連付けられる。
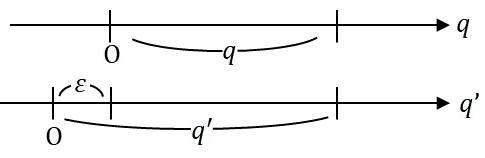
座標上の位置を変えるのではなく, 座標そのものを変えることに注意。座標変換をしてもラグラジアンが不変(対称)ならば,
\[\begin{align}
0&=L(q'_i,\dot{q_i}')-L(q_i,\dot{q_i}) \\
&=L(q_i+\varepsilon\Phi_i,\dot{q_i}+\varepsilon\dot{\Phi_i})-L(q_i,\dot{q_i}) \\
&=L(q_i,\dot{q_i})+\dd{L}{q_i}\varepsilon\Phi_i+\dd{L}{\dot{q_i} }\varepsilon\dot{\Phi_i}+O(\varepsilon^2)-L(q_i,\dot{q_i}) \\
&\cong\varepsilon\left(\dd{L}{q_i}\Phi_i+\dd{L}{\dot{q_i} }\dot{\Phi_i}\right)
\end{align} \]
2行目から3行目はテイラー展開で\(~\varepsilon~\)の1次の項までを取ったものである。右辺の( )内第1項に(1)式オイラー・ラグランジュ方程式の右辺を代入すると,
\[\frac{d}{dt}\left(\dd{L}{\dot{q_i}}\right)\Phi_i+\dd{L}{\dot{q_i}}\dot{\Phi_i}=0 \]
であるが, この式は上手くまとまって
\[\frac{d}{dt}\left(\dd{L}{\dot{q_i}}\Phi_i\right)=0 \]
すなわち,
\[F=\dd{L}{\dot{q_i}}\Phi_i=const. \]
を得る。改めて書くと, ラグランジアン\(~L~\)が無限小座標変換
\[q_i\to q'_i=q_i+\varepsilon\Phi_i(q_i) \]
の下で不変(対称)ならば,
\[ F=\dd{L}{\dot{q_i}}\Phi_i\]
が保存する。\(F~\)をモーメント関数と呼ぶ。これがネーターの定理であるが, 少々分かり難い。具体例にあたってみよう。
角運動量 真打登場
\(z~\)軸の周りに\(~xy~\)平面を\(~\varepsilon~\)だけ回転させると,
\[\left\{
\begin{array}{l}
x'=xcos\varepsilon-ysin\varepsilon\cong x-\varepsilon y \\
y'=xsin\varepsilon+ycos\varepsilon\cong y+\varepsilon x \\
z'=z
\end{array}
\right.\]
これを\(~q'_i=q_i+\varepsilon\Phi_i~\)と比べると
\[\left\{
\begin{array}{l}
x'=x+\varepsilon\Phi_1 \\
y'=y+\varepsilon\Phi_2 \\
z'=z+\varepsilon\Phi_3
\end{array}
\right.\]
より\(~\Phi_1=-y,\Phi_2=x,\Phi_3=0~\)を得る。この下でラグラジアンは
\[\begin{align}
L&=\frac{1}{2}m(\dot{x}'^2+\dot{y}'^2+\dot{z}'^2)-U(r') \\
&=\frac{1}{2}m\{(\dot{x}-\varepsilon \dot{y})^2+(\dot{y}+\varepsilon \dot{x})^2+\dot{z}^2\}-U\left(\sqrt{(x-\varepsilon y)^2+(y+\varepsilon x)^2+z^2}\right) \\
&=\frac{1}{2}m(\dot{x}^2-\cancel{2\varepsilon \dot{x}\dot{y}}+\dot{y}^2+\cancel{2\varepsilon \dot{x}\dot{y}}+\dot{z}^2+O(\varepsilon^2))
-U\left(\sqrt{x^2-\cancel{2\varepsilon xy}+y^2+\cancel{2\varepsilon xy}+z^2+O(\varepsilon^2)}\right)\\
&=\frac{1}{2}m(x^2+y^2+z^2)-U(r)
\end{align} \]
となり不変である。つまり, 不変なモーメント関数
\[F=\dd{L}{\dot{q}}\Phi_i \]
が存在する。今の場合モーメント関数は
\[\begin{align}
F&=\dd{L}{\dot{q_1}}\Phi_1+\dd{L}{\dot{q_2}}\Phi_2+\dd{L}{\dot{q_3}}\Phi_3 \\
&=\dd{L}{x}\Phi_1+\dd{L}{y}\Phi_2+\dd{L}{z}\Phi_3 \\
&=m\dot{x}(-y)+m\dot{y}x+m\dot{z}\cdot 0 \\
&=-p_x y+p_y x=p_z
\end{align} \]
つまり角運動量の\(~z~\)成分が不変量である。
\(~xy~\)平面での微少回転ではラグラジアンは不変であり, 対応する不変なモーメント関数が存在する。このとき角運動量(の\(~z~\)成分)が保存量である。
「回転対称性は角運動量保存則と1対1に対応する」となる。これならば定理と呼んでも良いか?